使用高光譜和激光雷達數據區分楊樹林中的生物脅迫和非生物脅迫
亞洲天牛(Anoplophora glabripennis, ALB)是一種嚴重威脅全球闊葉林的蛀木害蟲,特別對中國西北干旱地區的楊樹防護林造成了顯著破壞。由于干旱和 ALB 脅迫均會引起缺水癥狀,但其成因和治理方法截然不同,及時區分這兩種脅迫對制定有效治理措施至關重要。高光譜成像(HSI)和激光雷達(LiDAR)技術因其在植物脅迫檢測中的潛力而備受關注,HSI 提供精細的光譜信息,LiDAR 捕獲冠層三維結構變化。然而,單一技術存在局限性,結合 HSI 和 LiDAR 數據能夠彌補不足,實現更精確的脅迫檢測。本研究采用偏最小二乘支持向量機(PLS-SVM)方法,有效降低數據維度,避免過度擬合,提升分類精度,旨在:(1)評估無人機 HSI 和 LiDAR 數據區分 ALB 損傷、干旱脅迫及復合脅迫的能力;(2)探索兩種數據對脅迫的響應特征,篩選最敏感的檢測指標,為干旱地區楊樹健康監測和管理提供科學依據。
研究地塊位于中國西北部甘肅省酒泉市,屬戈壁地貌,氣候類型為大陸性干旱氣候,年均降水量為80毫米,但年均蒸發量達2000毫米。本研究選取了兩個水分條件不同(灌溉和非灌溉)且樹齡相近的林場(圖1)。
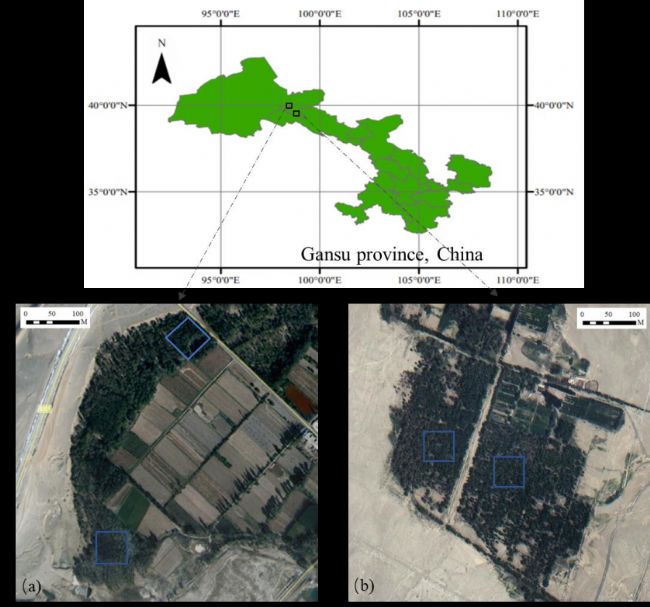
圖 1. 本研究的研究區域。(a)酒泉新城國有林場(水源充足)。(b)酒泉三河國有林場(缺水)。四個樣地標記為藍色。
樣地1(圖1a):酒泉新城國有林場(39°57′N,98°23′E)。農田防風林,灌溉良好,有地表水,包括健康林和黃萎病林,樹齡為40–60年。研究樹種為甘肅楊、白楊和旱柳。樣地2(圖1b):酒泉三河國有林場(39°23′N,99°04′E)。灌溉條件極差,無地表水,兩年未正常灌溉。林分健康林和黃萎病林,樹齡為40-60年。研究樹種與樣地1相同。兩個農場都有健康林和黃萎病林的楊樹。兩個農場都位于海拔1480 m的平坦區域。土壤條件相同:棕色沙漠土,有機質含量低,氮素含量低。兩個樣地均被甘肅楊覆蓋。我們在每個林場建立了兩個50×50米的樣地,共四個樣地。總共有四種類型的樣本樹:健康(H)、僅受黃萎病損害(A)、僅受干旱損害(D)和同時受黃萎病和干旱損害(AD)(圖2)。
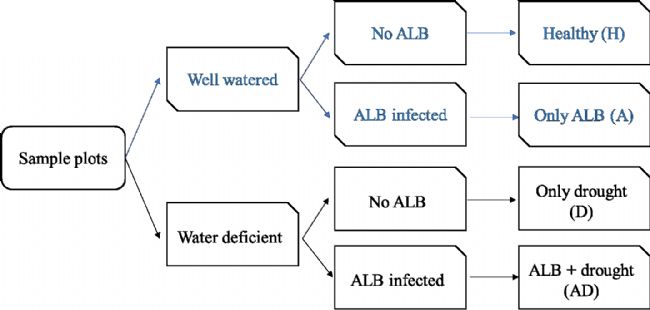
圖 2. 本試驗中的四種楊樹。括號中顯示了每種楊樹樣本的縮寫。
亞洲長角甲蟲(ALB)是一種樹干蛀蟲,通過識別漏斗狀產卵坑、排便孔和圓形出口孔(圖 3)確定楊樹是否受損。若發現這些特征或樹冠稀疏(稀疏葉片、干枯枝條),則認為楊樹受到 ALB 損傷。
葉面積指數 (LAI) 反映葉片密度及生物物理能力。采用 SmartLAI 應用程序從不同方向進行四次測量取平均值,評估樹冠稀疏程度。調查了 325 棵楊樹:健康(H)66 棵,受 ALB 脅迫(A)75 棵,受干旱脅迫(D)80 棵,受雙重脅迫(AD)104 棵,表 1 顯示不同條件下的 LAI 數據。
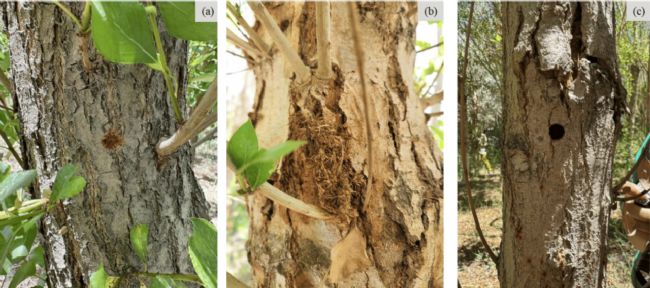
圖 3. 確定 ALB 損害的證據。(a) ALB 成蟲在漏斗狀的產卵坑中挖溝。(b) ALB 幼蟲排出的糞便。(c) ALB 成蟲的圓形出口孔。
表 1. 四種脅迫條件下楊樹林葉面積指數。

在同一飛行活動期間,使用 DJI M600 無人機搭載IRIS LR-1601激光雷達一體機(北京理加聯合科技有限公司)收集高光譜圖像 (HSI) 和激光雷達數據(圖 4)。安裝系統使高光譜和激光雷達設備能夠聯合使用無人機的慣性測量單元 (IMU) 和全球定位系統 (GPS),從而實現高精度正射校正和數據融合。無人機還配備了 RTK 系統,可實現厘米級精確定位。2021 年 8 月 2 日 12:20 至 12:50 PM 采集了地塊 1(水量充足)的數據,2021 年 8 月 3 日上午 11:50 至下午 12:30 采集了地塊 2(缺水)的數據。飛行在萬里無云的天空下進行,高度為 100 米,速度為 3 米/秒,正面和側面圖像重疊度為 60%。
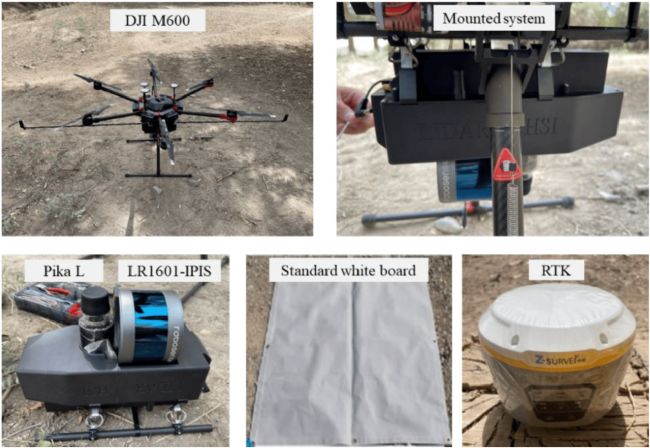 圖4.本研究中的無人機搭載系統。
圖4.本研究中的無人機搭載系統。高光譜成像儀的視場為 10°,焦距為17 mm。高光譜圖像包含 150 個光譜帶,范圍從 400 到 1000 nm。高光譜圖像以 0.1 m 的空間分辨率生成。使用標準白板進行反射率校正和輻射校準(圖 4)。高光譜圖像與具有十二個地面控制點 (GCP) 的 LiDAR 數據進行匹配,總體均方根誤差 (RMSE) < 1 像素。
利用 LiDAR360 軟件的冠層高度模型 (CHM) 分割單棵樹,CHM 由 DSM 和 DEM 生成,分辨率為 0.1 米。根據 CHM 分割結果提取樣本樹的高光譜和 LiDAR 特征,并手動修正錯誤分割的樣本樹。僅計算每棵樹冠的陽光照射像素的高光譜反射率,并用 Savitzky-Golay 濾波器平滑處理。提取了 23 個光譜變量(包括 12 個植被指數、5 個吸收帶、2 個紅邊參數和 4 個吸收特征)及 32 個 LiDAR 變量(14 個與點云高度分布相關、13 個點云強度指標和 5 個冠層密度指標)。共使用 55 個變量進行篩選,并開發 PLS-SVM 分類模型。
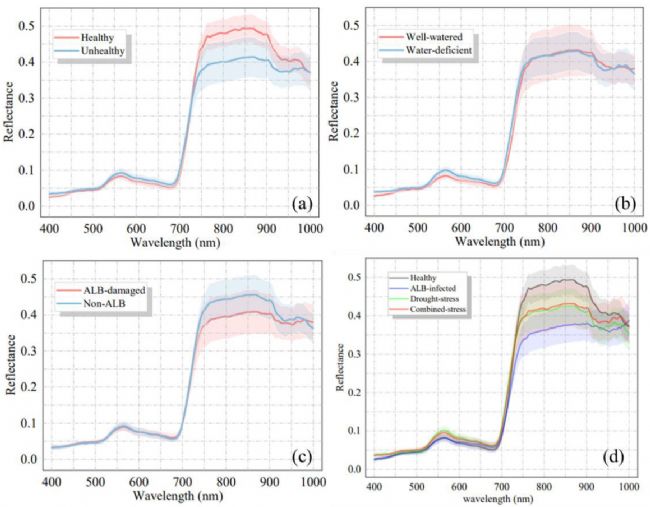
圖 5. 楊樹的平均光譜反射率按以下方式分組:(a) 健康/不健康;(b) 澆水充足/缺水;(c) ALB 受損/無 ALB;(d) 健康/ALB 感染/干旱脅迫/復合脅迫。注:陰影區域表示平均值的標準偏差。
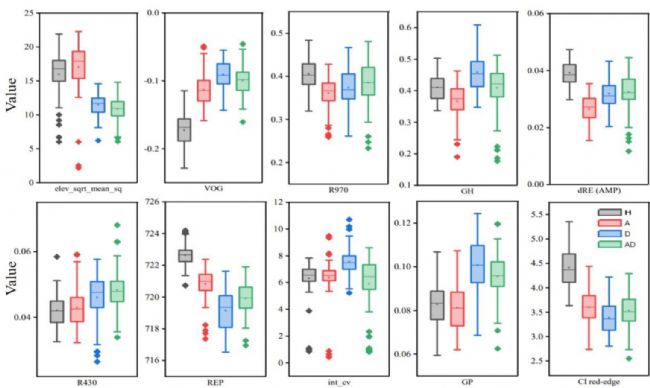
圖 6. 不同壓力下高光譜和 LiDAR 圖像得出的十個典型參數(H:健康;A:ALB 壓力
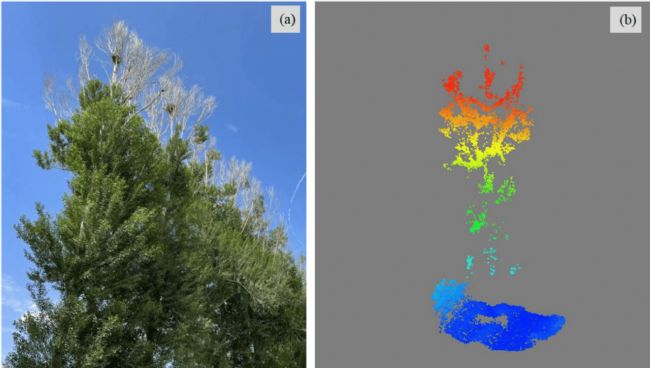
圖 7. 受到 ALB 損傷的楊樹干梢。(a) RGB 圖像。(b) LiDAR 圖像。
研究表明,無人機高光譜圖像和激光雷達的組合可以檢測和區分楊樹的 ALB 和干旱脅迫。PLS-SVM 分類在區分水分充足和缺水樹木方面實現了 94.85% 的準確率,在檢測 ALB 損害方面實現了 80.81% 的準確率。對四種楊樹類別進行分類的總體分類準確率為 78.79%:健康、僅受 ALB 影響、僅受干旱影響以及干旱和 ALB 損害并存的楊樹。開發的分類模型為檢測和區分脅迫類型提供了寶貴的工具,使及時干預措施成為可能,例如在楊樹林中進行灌溉或病蟲害防治,尤其是在戈壁沙漠的惡劣條件下。